
以前の記事にてDCモータが回転するメカニズムについて解説しました。
本記事ではモータの電気的時定数の意味について解説し、機械的時定数の導出についても解説していきます。
機械的時定数に関してはこの記事を読んでね。
電気的時定数とは
DCモータのシャフトを拘束(ロック)し、一定の電圧を印加すると電流が増加していき、やがて一定の電流になります。
電気的時定数(Electrical time constant)とは、電源ONから定常電流の63.2%に達するまでの時間のことです。
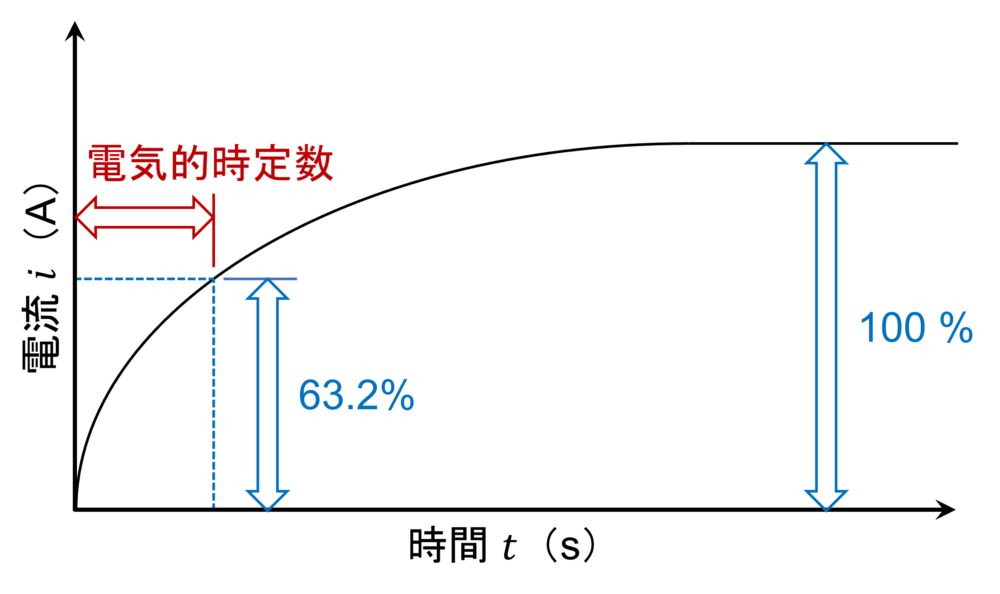
モータの巻線の電気抵抗を\(R\)(単位:\(\Omega\))、インダクタンスを\(L\)(単位:\(H\))と置くと、電気的時定数\(\tau_E\)(単位:\(s\))は下式より求まります。
電気的時定数の導出
まず、電圧\(e_{mt}\)(単位:\(V\))を印加し、モータシャフトを拘束(ロック)させたときに電流\(i\)(単位:\(A\))が流れる下図のようなDCモータのモデル(等価回路)を考えます。
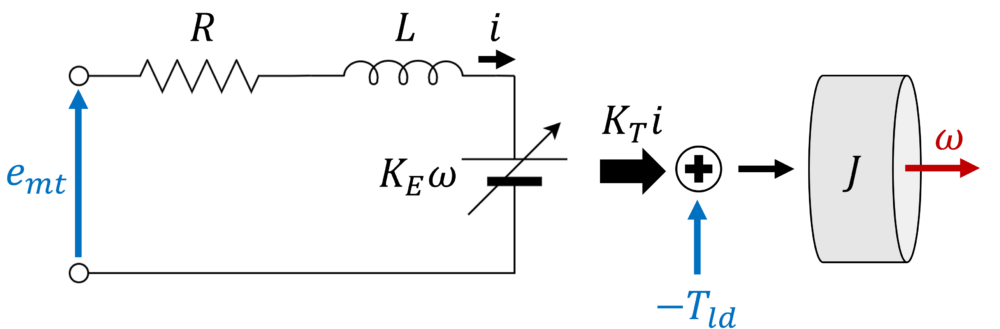
このとき、モータシャフトを拘束(\(\omega = 0\))しているため、逆起電力は発生しません。よって、単純なRL直列回路について考えればよいことになります。
RL直列回路の数理式は以下のようになります。
本記事では \(t<0\) でモータに印加される電圧が \(0\)(\(V\))だった状態が、\(t \geq 0\) でモータに印加される電圧が \(e_{mt}\)(\(V\))となるステップ入力での応答(ステップ応答)について考えます。
まず、式(2)を変数分離すると
となり、両辺を積分すると以下のようになります。(\(C_1\) は積分定数)
ここで指数をとると
となります。左辺は全て正であるため、絶対値記号を外し、\(\exp(C_1)\)は定数であるため、\(C_2\)と置き換えると
となります。ここで、\(t=0\) のとき、\(i=0\) という初期条件を与えると
となります。式(10)に式(11)を代入し、式を整理すると以下のようになります。
式(12)の \(\frac{L}{R}\) の部分は応答の速さを示し、電気的時定数と呼ばれます。
まとめ
本記事ではモータシャフトを拘束(ロック)し、一定の電圧を加えた際のステップ応答の式について解説し、その応答の速さを示す指標として電気時定数を紹介しました。
モータの種類、基本構造、回転原理、制御方法、応用例(電気自動車、家電)など、幅広い知識を知りたい方は以下の書籍がおすすめです。カラーの写真やイラストがふんだんに使われており、見ていて楽しい本になっています。
また、モータ設計の入門書としては以下の書籍が参考になります。モータの概略設計、鉄心設計、巻線設計、詳細設計、性能計算、材料選定、放熱、等価回路、磁界解析など一通り勉強することができます。
また、モータを応用(モータ使う機器を設計)する方がモータの仕様書を書く際にも大変役に立ちます。
 モータの機械的時定数とは【電動化、1D CAE】
モータの機械的時定数とは【電動化、1D CAE】
 基礎から学ぶDCモータの1Dモデル化① ~MATLAB/Simulink~
基礎から学ぶDCモータの1Dモデル化① ~MATLAB/Simulink~
 簡単・手軽!フリーの電子回路シミュレータ 3選【試作費節約】
簡単・手軽!フリーの電子回路シミュレータ 3選【試作費節約】 